Lorsque vous regardez un drone en activité, avez-vous déjà pensé à tous les processus de calcul qui fonctionnent en arrière-plan pour le maintenir stable dans les airs ? Ce qui motive la stabilisation d’un drone, c’est un contrôleur de feedback dénommé « PID » – Proportional Integral Derivative. Le contrôleur PID joue un rôle crucial pour obtenir une stabilité précise, assurant le bon fonctionnement du drone. Plongeons dans le monde passionnant du PID et découvrons comment il contribue à la stabilisation des drones.

Comprendre le Contrôleur PID et son Application dans les Drones
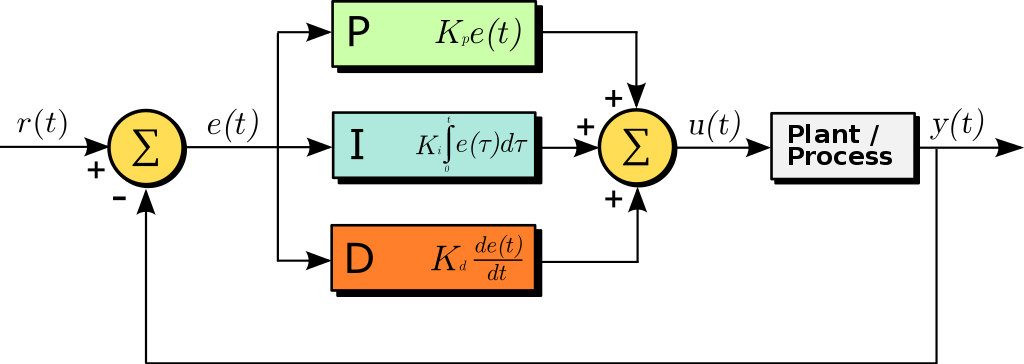
Le Contrôleur PID est un type de contrôleur de boucle fermée qui utilise un système de rétroaction pour contrôler le mouvement de divers objets. Le contrôleur reçoit des informations de feedback en continu, vérifie la différence entre la valeur de consigne (l’objectif à atteindre) et la valeur de processus (la valeur actuelle), et fait les ajustements nécessaires pour minimiser cette différence.
La force du PID réside dans sa capacité à utiliser trois éléments de contrôle différents en parallèle :
- Un élément proportionnel (P) qui réagit en fonction de l’ampleur de l’erreur de manière directement proportionnelle.
- Un élément intégral (I) qui réagit en fonction de combien de temps l’erreur a persisté.
- Un élément dérivée (D) qui réagit à la variation de l’erreur.
Dans le cas de l’utilisation des PID dans les drones, ces trois éléments contribuent à contrôler les erreurs de position et de vitesse, garantissant une stabilité en vol précise.
Rôle des Composants PID
La Part Proportionnelle (P)
Le composant Proportionnel agit comme un levier principal du système. Elle est généralement la première à être ajustée lors du réglage d’un PID. Plus la valeur P est élevée, plus la réaction du drone sera rapide à une erreur. Une valeur P trop basse entraînerait un manque de réaction à des erreurs, tandis qu’une valeur P trop élevée pourrait entraîner un mouvement excessif et instable.
La Part Intégrale (I)
Le composant Intégral s’ajuste en fonction de ‘l’accumulation’ des erreurs dans le temps. Il contribue à éliminer le biais statique en augmentant la réponse jusqu’à atteindre la valeur cible, même lorsque la part proportionnelle ne peut plus le faire. Un taux d’intégration élevé peut cependant conduire à un surajustement, où le système oscille autour de la valeur cible.
La Part Dérivative (D)
Le composant Dérivé prévoit les erreurs futures en s’ajustant à la vitesse à laquelle l’erreur change. Cela permet dôme de « lisser » les réactions, en évitant les brusques changements de direction ou de vitesse. C’est particulièrement utile pour contrer l’instabilité potentielle causée par des valeurs P ou I plus élevées.
Stabilisation des Drones en utilisant le PID
L’utilisation de contrôleurs PID dans les drones aide les moteurs à s’ajuster en fonction de la position désirée du drone. Grâce aux signaux de feedback, le système PID indique aux moteurs de compenser toute erreur afin de stabiliser l’appareil.
L’équilibrage joue un rôle majeur dans la stabilisation des drones. Si un drone penche d’un côté, les moteurs de ce côté devront tourner plus vite pour corriger la déviation. C’est là que le contrôleur PID entre en jeu pour déterminer exactement à quelle vitesse ces moteurs devraient tourner.
Défis et solutions : La réglage PID
L’un des défis majeurs dans l’utilisation efficace du PID est de savoir comment régler les poids P, I et D pour obtenir la meilleure performance. Le réglage de ces paramètres est fondamental pour un vol stable et coulissant du drone. Un PID mal réglé peut entraîner des comportements non désirés tels que des oscillations importantes et une réponse retardée.
Afin d’obtenir un réglage optimal du PID, plusieurs méthodes peuvent être utilisées. Par exemple, le réglage peut être réalisé manuellement en ajustant progressivement chaque composant, en commençant par le gain proportionnel, suivi du gain intégral et enfin du gain dérivé. Il existe aussi des techniques automatisées de réglage PID, telles que la méthode de Ziegler-Nichols.
Ainsi, le contrôleur PID a un impact immense sur le contrôle et la stabilisation des drones, qu’il s’agisse d’un hobby ou d’une industrie à grande échelle. En maîtrisant les mécanismes profonds de ce contrôleur versatile, nous pouvons réaliser pleinement les pare-chocs potentiels de la technologie des drones.